
站在巨人肩上再创造!人形机器人“天工”面向行业开源开放
2024-11-12
全国首个,深圳海关智能查验机器人引入“满血版”DeepSeek-R1
机器人养老,需要更多“痛点思维”
中国机器人在“灵巧”上胜过美国
全市首次应用机器人进行带电修剪树枝作业
国内首款开源人形机器人Fourier N1发布,开启机器人生态建设新篇章
华东理工大学“脑控机器狗”新突破,戴着智能头环就能“遛狗”
微型脑机接口问世:能置于毛囊间读数据
全球首个几乎完全由机器完成体外受精的婴儿诞生
韩国集全国力量押注“K-人形机器人联盟”
哈工大打造机器人领域顶级国际期刊《智能机器人》,面向全球
浙江杭州引入宇树机器狗,用作移动水炮为消防员火场开路
中国唯一,首批锐翔 RX1E-A 电动固定翼飞机交付
首个机器人主播登场,开播5分钟“带货”128万元!
越疆宣布推出新一代 CRAF 智能力控协作机器人
微软 CTO 预判:未来一年 AI 智能体记忆能力将有重大突破
站在巨人肩上再创造!人形机器人“天工”面向行业开源开放
最后更新:2024-11-12 浏览:1418次
站在巨人肩上再创造!人形机器人“天工”面向行业开源开放
人形机器人的“顶流”——天工即将拥有更多“兄弟姐妹”。 资料图片11月11日,国家地方共建具身智能机器人创新中心启动“天工开源计划”,将陆续将本体、数据集、运动控制等方面的技术成果面向行业开源开放。全球高校、科研院所、集成商等可在此基础上再开发,加速人形机器人真正进入人类生活。
资料图片11月11日,国家地方共建具身智能机器人创新中心启动“天工开源计划”,将陆续将本体、数据集、运动控制等方面的技术成果面向行业开源开放。全球高校、科研院所、集成商等可在此基础上再开发,加速人形机器人真正进入人类生活。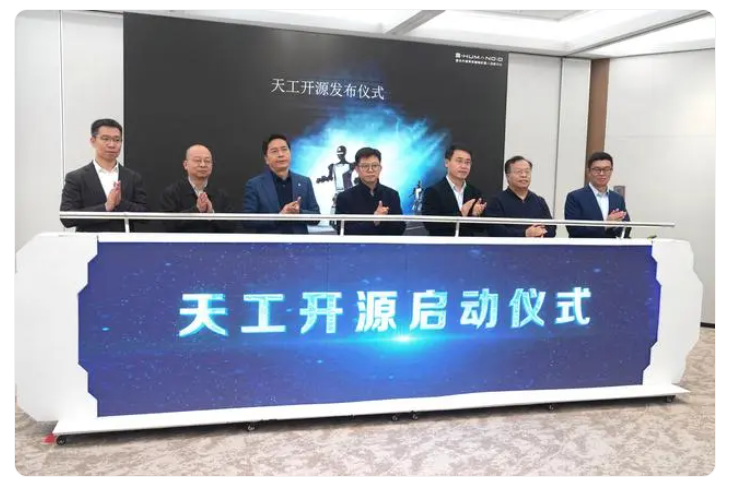 形象地说,“开源”就是将已有的技术开放给行业使用,其他企业和科研机构能“站在巨人的肩膀上”再创造、再研发。机器人行业内非常知名的一次开源,便是麻省理工学院开源了四足“机器狗”相关技术,从而让国内外涌现出一批四足机器人研发、生产、制造厂商,加速了四足机器人产业化进程。
形象地说,“开源”就是将已有的技术开放给行业使用,其他企业和科研机构能“站在巨人的肩膀上”再创造、再研发。机器人行业内非常知名的一次开源,便是麻省理工学院开源了四足“机器狗”相关技术,从而让国内外涌现出一批四足机器人研发、生产、制造厂商,加速了四足机器人产业化进程。
 刚刚起步的人形机器人研发难度非常大,虽然已进行了长期的技术迭代,但行业内还没有真正形成包含整机系统设计、控制算法、智能化应用等的统一方向。去年4月,北京人形机器人“天工”问世,它像人类一样的奔跑更是让人印象深刻。这次开源的便是能在多种地形中平稳移动、实现拟人奔跑的“天工LITE”,以及手臂更强壮、配备灵巧手的“天工PRO”。
刚刚起步的人形机器人研发难度非常大,虽然已进行了长期的技术迭代,但行业内还没有真正形成包含整机系统设计、控制算法、智能化应用等的统一方向。去年4月,北京人形机器人“天工”问世,它像人类一样的奔跑更是让人印象深刻。这次开源的便是能在多种地形中平稳移动、实现拟人奔跑的“天工LITE”,以及手臂更强壮、配备灵巧手的“天工PRO”。
“机器人本体设计是个长周期的过程,从立项设计、图纸绘制,到关节选型、运动控制、算法迭代验证,基本需要半年到一年的时间。”研发“天工”的国家地方共建具身智能机器人创新中心本体负责人刘益彰介绍,目前“天工”母平台经过大量测试验证,开源之后,其他企业和科研机构就可以直接使用它,缩短了行业的开发周期、也降低了研发成本。 本月恰恰是该创新中心成立一周年。这一年,该创新中心围绕通用机器人母平台“天工”、全身协同智能小脑平台和多能具身智能体平台“开物”加速技术突破。
本月恰恰是该创新中心成立一周年。这一年,该创新中心围绕通用机器人母平台“天工”、全身协同智能小脑平台和多能具身智能体平台“开物”加速技术突破。
先说“跑”。基于全身协同智能小脑平台,“天工”实测平均时速可达每小时10公里,最高奔跑速度已提升至全球领先的每小时12公里。同时,“天工”还可在斜坡、楼梯、草地、碎石、沙地多种复杂泛化地形中实现平稳移动。
“天工”是本体平台,而多能具身智能体平台“开物”则包含AI大模型驱动任务规划的具身大脑和以数据驱动的端到端技能执行具身小脑,具备一脑多机、一脑多能的能力,未来将拥有200万条机器人轨迹数据,适配超20个以上机器人本体,实现具身能力开发时间降低90%。数据生态方面,创新中心数据采集涵盖6类本体7大典型场景,日产数据已达10TB。
“我们将联合全球高校、科研院所、集成商等具备人形机器人二次开发能力的机构,共同打造最具影响力的具身智能开源开放社区。”创新中心总经理熊友军介绍。
目前,“天工”的很多图纸已经可以在网上直接下载。“天工”软件开发文档、结构设计文档已经开放,年底该创新中心还将开源天工结构图纸、软件架构、电气系统等内容,数据集、运动控制训练框架等方面也将陆续开放开源。北京大学、华中科技大学、优必选、江汉大学等首批合作伙伴,将通过课题申报、实验室共建、揭榜挂帅等多种形式合作共研,以“天工”为基础平台,在本体开发、具身大脑、智能小脑等多个前沿方向加速探索。
“一次开源,其实可以带动整个人形机器人上下游的发展。”刘益彰解释,目前很多核心零部件都是企业自主研发,但性能参数指标上还较为混乱,“开源”之后大家便可以在统一平台上技术开发;应用探索方面也是如此,“天工”整合了行业里的优势力量一起开发产业应用,让人形机器人在生产生活中加速落地。
